このページの翻訳:
サイドバー
ja:tutorials:plen2:leg
目次
Leg
Table of Contents
- Leg Current section
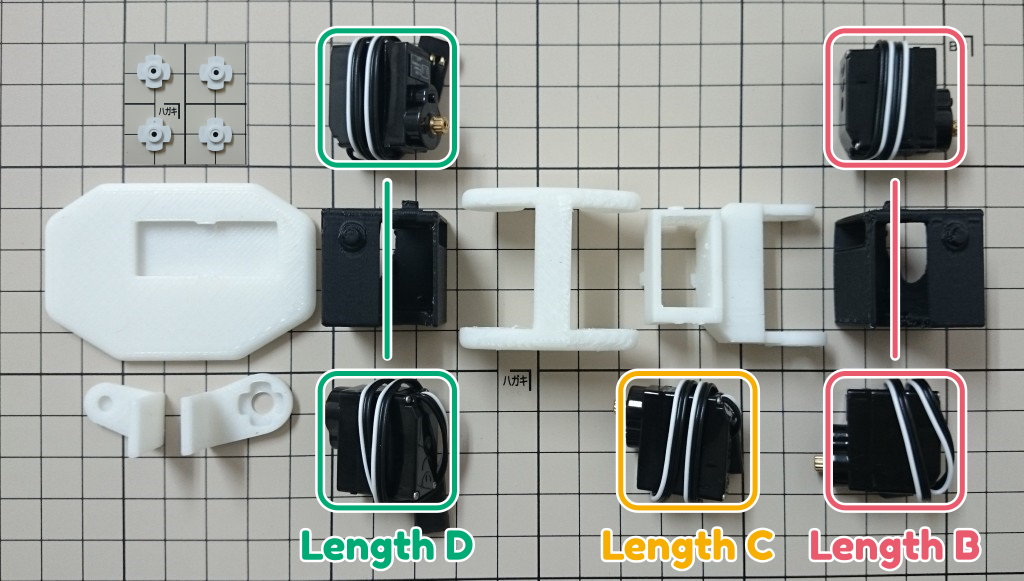
Parts List
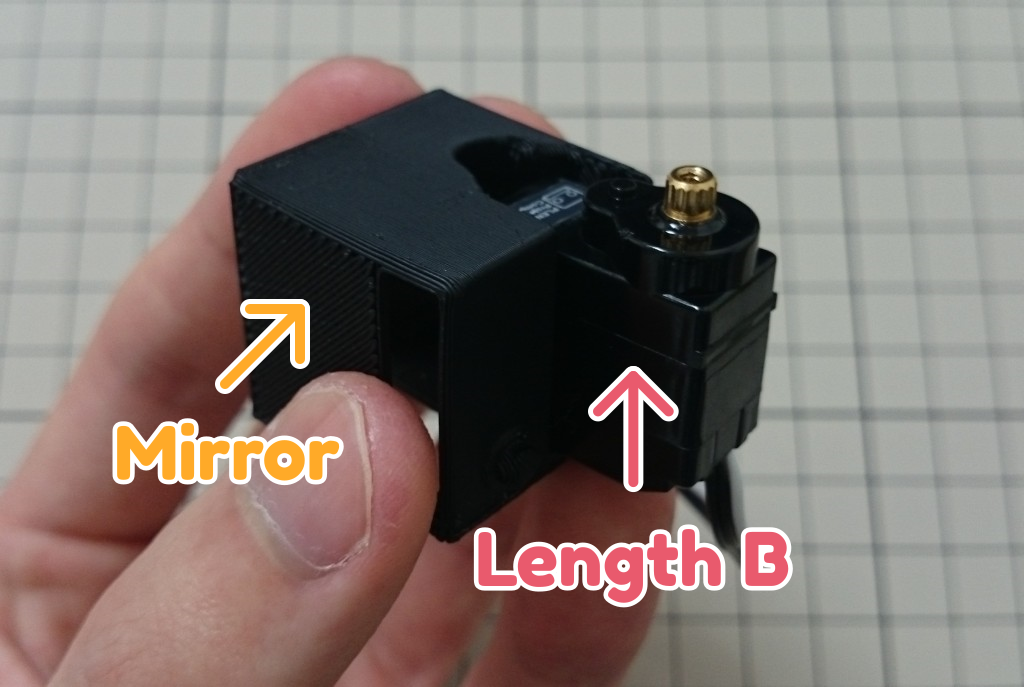
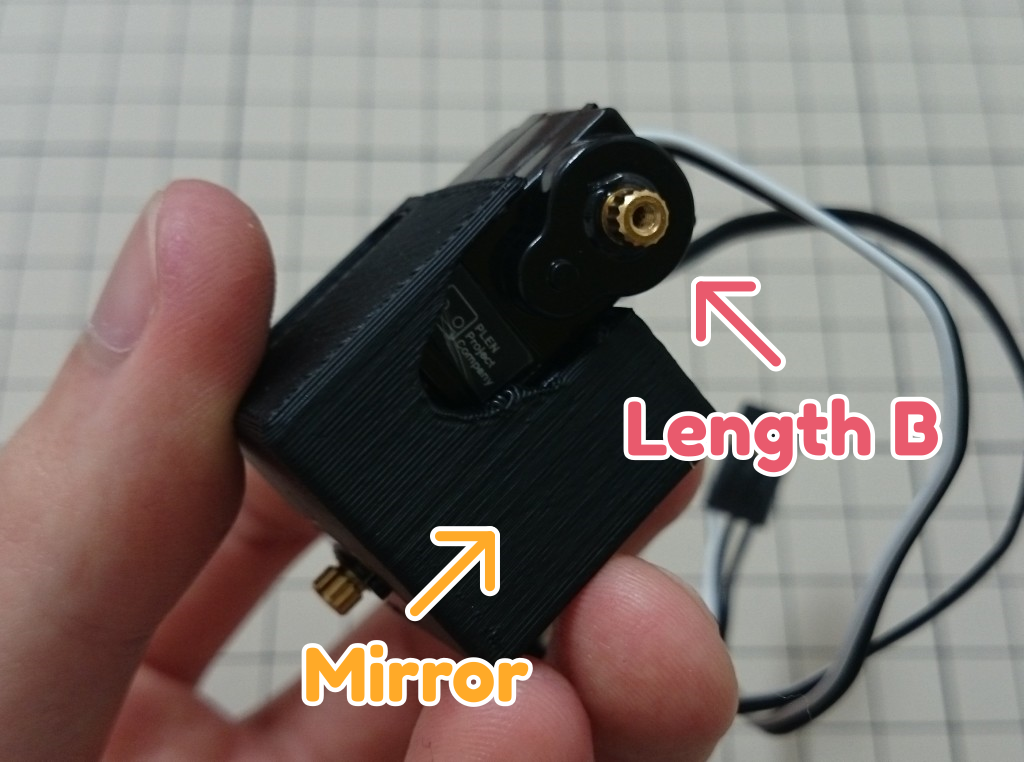
左足の部品リストは以下の通りです。 右足を組み立てる際には、'_mirror' という接尾辞を持つか持たない部品に適宜置き換えてください。
| Name | Q'ty |
|---|---|
| serve_horn.stl | 4 |
| servo_assem_type2.stl | 1 |
| servo_assem_type2_mirror.stl | 1 |
| servo_bracket_knee_mirror.stl | 1 |
| servo_bracket_shin_mirror.stl | 1 |
| servo_bracket_ankle_1_mirror.stl | 1 |
| servo_bracket_ankle_2_mirror.stl | 1 |
| foot_mirror.stl | 1 |
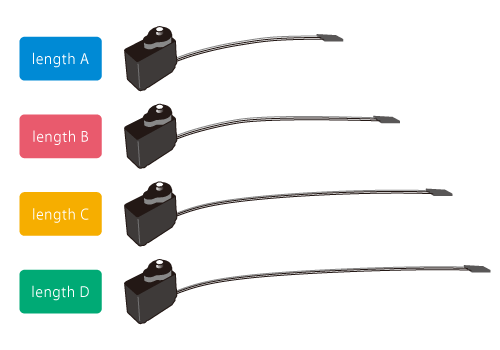
| Servo Motor (Length B) | 2 |
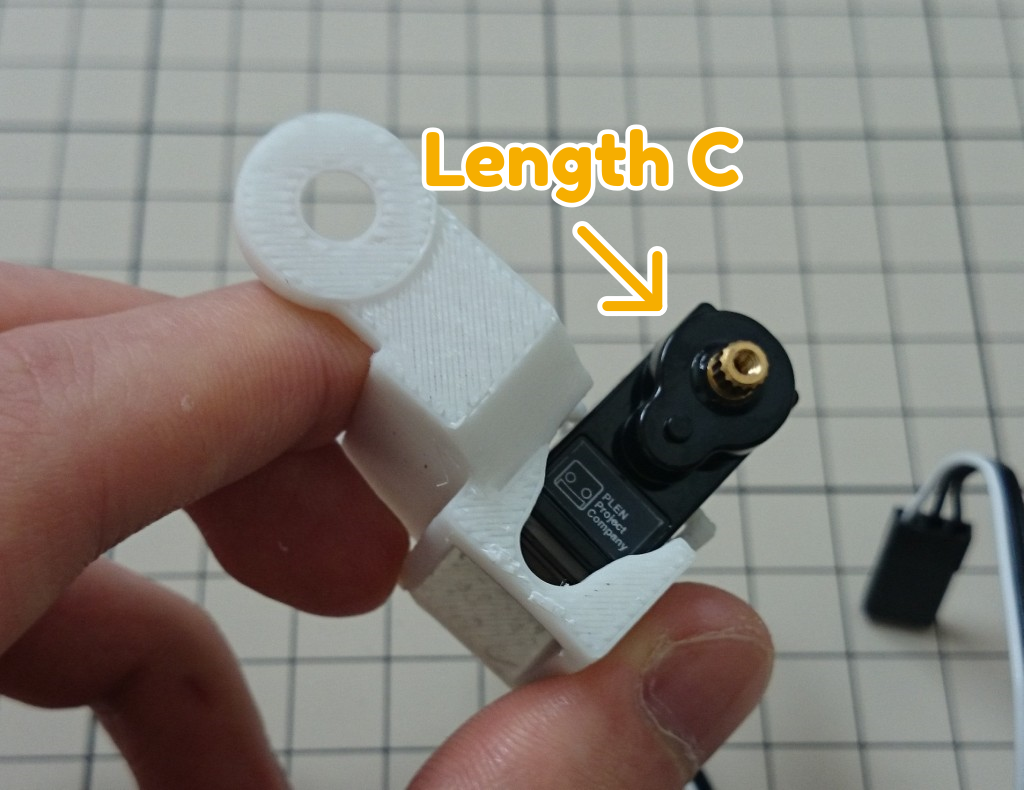
| Servo Motor (Length C) | 1 |
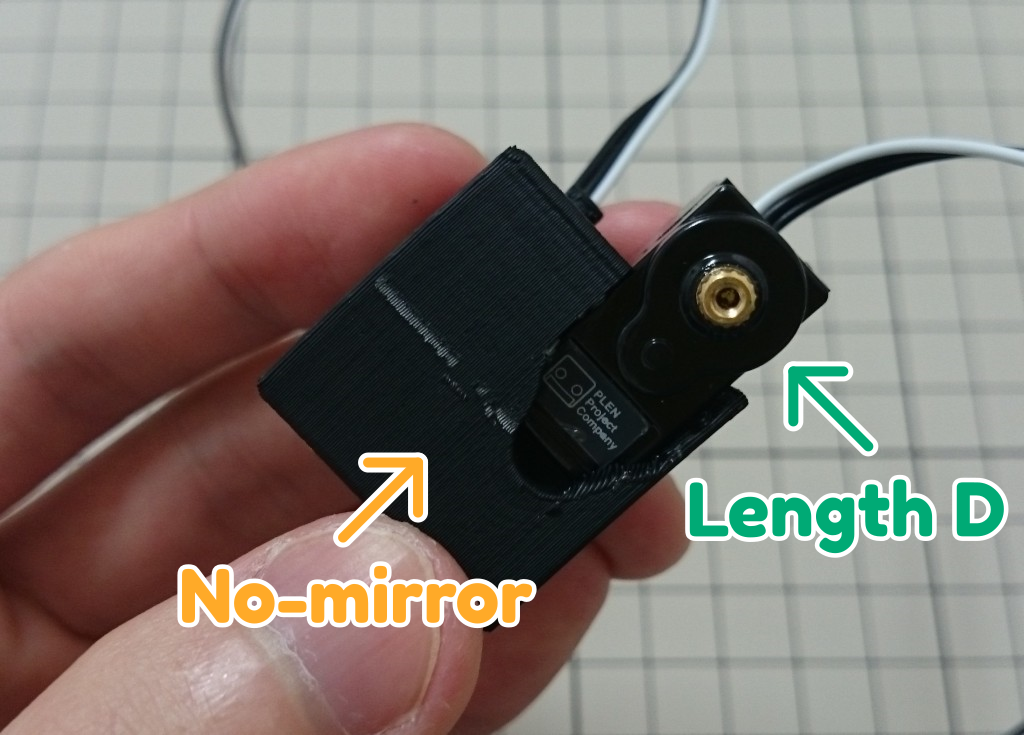
| Servo Motor (Length D) | 2 |
Print Detail
Assembling Process
Parts List
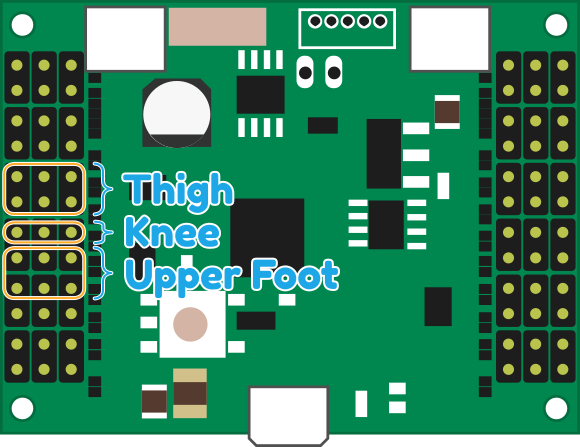
Thigh
Attention!: 左腿を組み立てるにあたり、servo_assem_type2_mirror.stl を使用する必要があります。 しかし右腿を組み立てる際には、servo_assem_type2.stl を使用する必要があります。
Knee
Upper Foot
Attention!: 左足上部を組み立てるにあたり、servo_assem_type2.stl を使用する必要があります。 しかし右足上部を組み立てる際には、servo_assem_type2_mirror.stl を使用する必要があります。

Lower Foot
Attention!: プラスチック成型部品版の組み立ての場合、このステップは必要ありません。


Merge Parts
Attention!: 部品を組み合わせる前に、コントロールボードとサーボモータを接続してください。 接続完了後、両方のスイッチをONにしその状態を維持します。

Attention!: 白いケーブルがコントロールボードの内側に位置するように、サーボモータを接続してください。

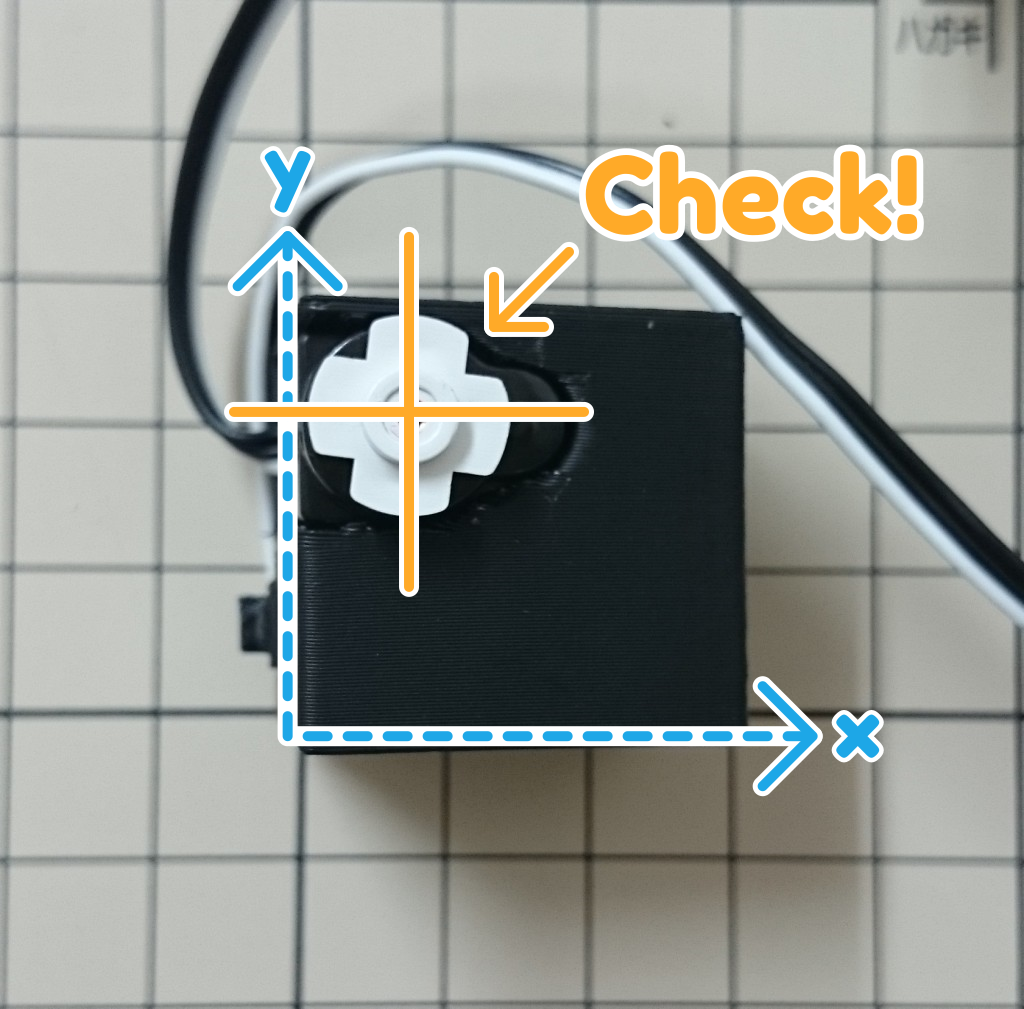
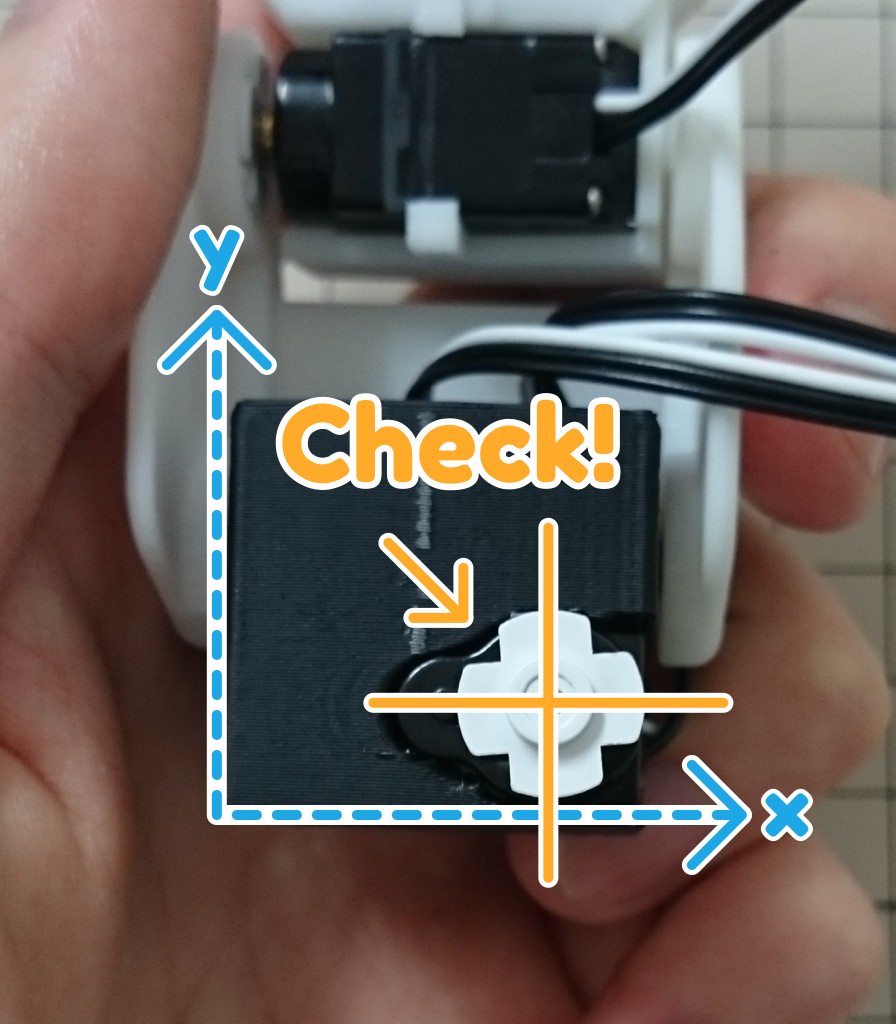
Attention!: 左腿にサーボホーンを取り付けます。 このとき、サーボモータの辺に対してサーボホーンがおおよそ水平垂直になるようにします。
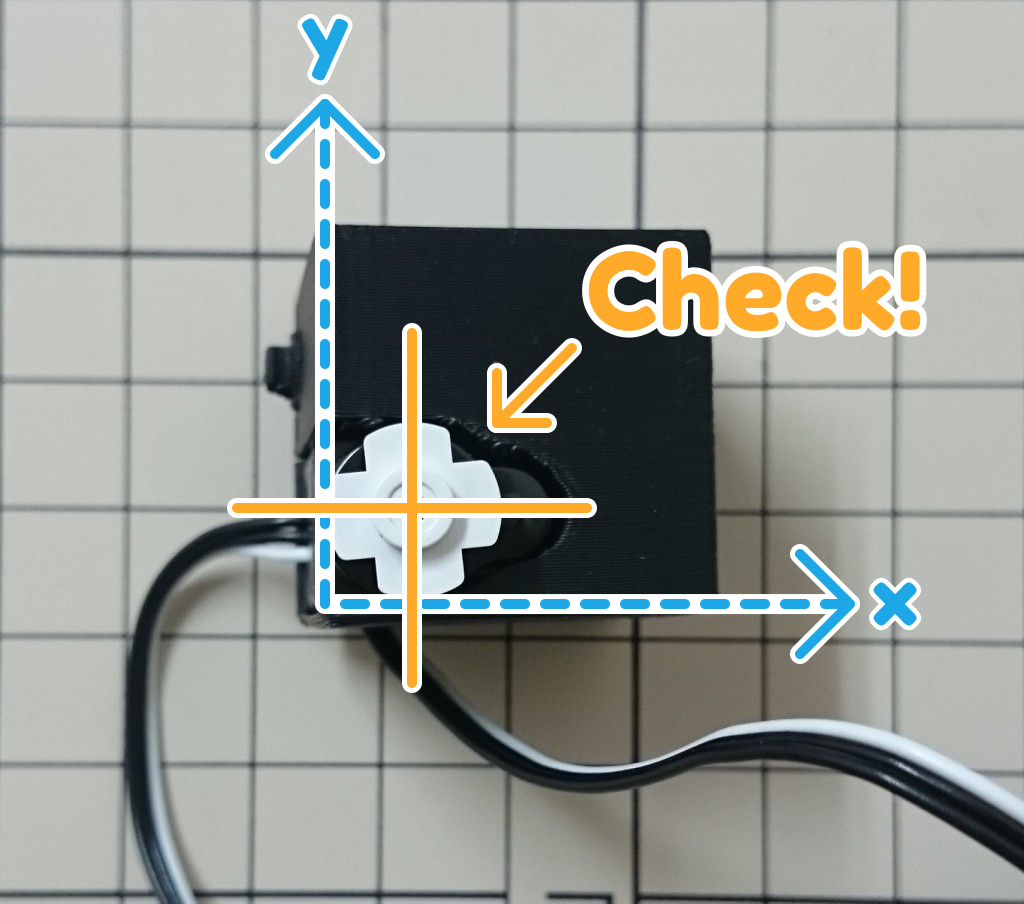

Attention!: 左膝にサーボホーンを取り付けます。 このとき、サーボモータの辺に対してサーボホーンがおおよそ水平垂直になるようにします。


Attention!: 左足上部にサーボホーンを取り付けます。 このとき、サーボモータの辺に対してサーボホーンがおおよそ水平垂直になるようにします。
Attention!: 左スネと左足上部を組み合わせる際、サーボモータのケーブルを左スネの内側に通します。

Attention!: 左足上部にサーボホーンを取り付けます。 このとき、サーボモータの辺に対してサーボホーンがおおよそ水平垂直になるようにします。

Finished Leg

ja/tutorials/plen2/leg.txt · 最終更新: 2021/04/01 13:53 (外部編集)
特に明示されていない限り、本Wikiの内容は次のライセンスに従います: CC Attribution-Share Alike 4.0 International
